在高速铁路的建设中,需要使用运梁车将箱梁从梁场运送到架设现场,而在运送的过程中,往往要通过许多隧道,一般的运梁车由于高度限制,使箱梁无法通过隧道。因此,设计出适合通过隧道的运梁车,在高铁工程中很有必要。现在一种解决箱梁过隧的方法是采用液压顶升系统,在未放箱梁前,先通过比例控制阀来将顶升油缸调至较低位置,再把箱梁放于顶升油缸上运送,当箱梁运至工地,实现运梁车与架桥机对接后,上升顶升油缸至一定高度,将移梁小车放于箱梁下适当位置,再下降顶升油缸,将箱梁放于移梁小车上,此后,便可进行移梁和架梁操作。但是运梁车驮运的箱梁在升降过程中,各个油缸很难保证不发生倾斜扭曲倾斜的现象,因此,在控制过程中,需要对升降进行合理的控制。
发明内容
针对上述现有技术存在的问题,本实用新型提供一种过隧运梁车的顶升同步控制系统,满足油缸控制的稳定、准确和高效,克服了液压系统的滞后性,从而保证箱梁在运送及升降过程中不发生扭曲倾斜的现象。
附图说明
图1为本实用新型原理框图。
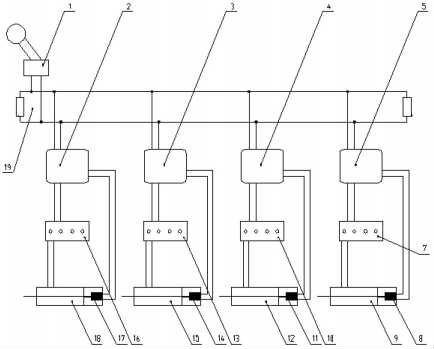
图中:1、控制手柄,2、控制器,3、控制器,4、控制器,5、控制器,7、多路阀,8、磁致伸缩位移传感器,9、顶升油缸,10、多路阀,11、磁致伸缩位移传感器,12、顶升油缸,13、多路阀,14、磁致伸缩位移传感器,15、顶升油缸,16、多路阀,17、磁致伸缩位移传感器,18、顶升油缸,19、CAN总线。
具体实施方式
如图1所示,本实用新型过隧运梁车的顶升同步控制系统,包括控制手柄1、控制器2、3、4、5、多路阀16、13、10、7和液压顶升油缸18、15、12、9,还包括磁致伸缩位移传感器17、14、11、8,控制手柄1将给定信息传输给四个控制器2、3、4、5,信息经四个控制器2、3、4、5处理之后,分别经四个多路阀16、13、10、7来控制四个液压顶升油缸18、15、12、9,液压顶升油缸18、15、12、9中分别安装有磁致伸缩位移传感器17、14、11、8,磁致伸缩位移传感器17、14、11、8将液压顶升油缸18、15、12、9的位置信息分别传给各自的控制器2、3、4、5。
作为优选,控制手柄I通过CAN总线19与控制器2、3、4、5连接。采用CAN总线通讯结构与软件设计,减少了电气元器件的实用,简化了电路,节约了成本。
工作原理:磁致伸缩位移传感器17、14、11、8,实时监控每个油缸的升降高度,并作为闭环负反馈信号输入到控制器2、3、4、5,经过A/D转换后与给定值进行比较,采用PID算法得出控制信号,自动调整液压顶升油缸18、15、12、9,升降速度,保证箱梁在升降过程中不发生倾斜。从接收反馈信号到输出控制信号的整个闭环控制过程,均通过控制器2、3、4、5来实现。整个控制过程满足其同步性、快速性、准确性和稳定性。
在工程领域,常常利用闭环控制来控制连续变化的模拟量,而无论是使用模拟控制器的模拟控制系统,还是使用计算机的数字控制系统,PID控制都得到了广泛的应用。利用积分控制可以消除系统的静差,微分控制可以改善系统的动态响应速度,比例、积分、微分控制三者有效地结合就可以满足不同的控制要求。依据被控对象的具体情况,还可以灵活合理的采用各种PID的改进型控制。